最近二十年以来,行人交通流的研究工作受到了多个领域的广泛关注,其中包括物理科学、工程科学等。充分了解行人运动行为,知晓其背后蕴藏的原理对城市交通公共设施的设计、相关法规的制定有着重大的指导意义,并且有助于确保紧急疏散逃生过程中的行人人身安全。复杂的非线性行人行为形成了一系列有趣的自组织现象,例如“快即是慢”效应、高密度拥挤状态下的湍流运动、双向行人流中的对向成行、瓶颈双向流动周期性振荡等。
视野受限环境普遍存在于行人交通流中,不论单向还是双向行人交通流,视野受限环境下的流量都要低于正常视野环境。双向行人交通流中,正常视野环境下不同方向的行人迅速分离成两个独立的队列,而且由于行人具有右行偏好习惯,顺时针人群总是更靠近环形通道内侧边界。视野受限环境下的双向行人交通流第一组实验,对向成行的自组织现象没有出现,行人始终没有演化到一个稳定状态,局部高密度拥堵不断出现和消散,但是始终没有导致完全阻塞的发生。然而在视野受限环境的随后剩余实验中,对向成行自组织现象再次出现,其中原因在于行人个体利用右行偏好的经验来减少碰撞的发生。实验证实一定的经验可以帮助行人更好地应对视野受限环境,一些黑暗条件下的演习有助于提高视野受限环境下的双向行人流流量。受力模型,调整了驱动力项并加入了右行偏好因素,另外还考虑了视野受限环境下行人无法准确判断自己前进方向,仿真结果与实验结果基本保持一致。
该成果近期发表在Transportation Research Part C (71, 2016, 63-85)上,主要完成人为2014级博士生郭宁。该研究受到国家重点基础研究计划No.2012CB725404,国家自然科学基金No. 11422221、71371175的支持。
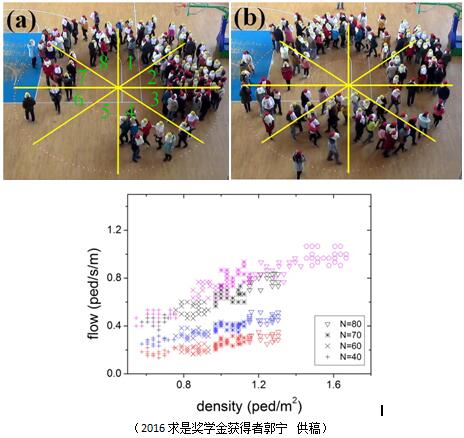
(2016求是奖学金获得者郭宁 供稿)